Stepping Motor Engineering
Introduction
Step motors convert electrical energy into precise mechanical motion. These motors rotate a specific incremental distance per each step. The number of steps executed controls the degree of rotation of the motor’s shaft. This characteristic makes step motors excellent for positioning applications. For example, a 1.8° step motor executing 100 steps will rotate exactly 180° with some small amount of non-cumulative error. The speed of step execution controls the rate of motor rotation. A 1.8° step motor executing steps at a speed of 200 steps per second will rotate at exactly 1 revolution per second.
Step motors can be very accurately controlled in terms of how far and how fast they will rotate. The number of steps the motor executes is equal to the number of pulse commands it is given. A step motor will rotate a distance and at a rate that is proportional to the number and frequency of its pulse commands.
Basic Stepping Motor System
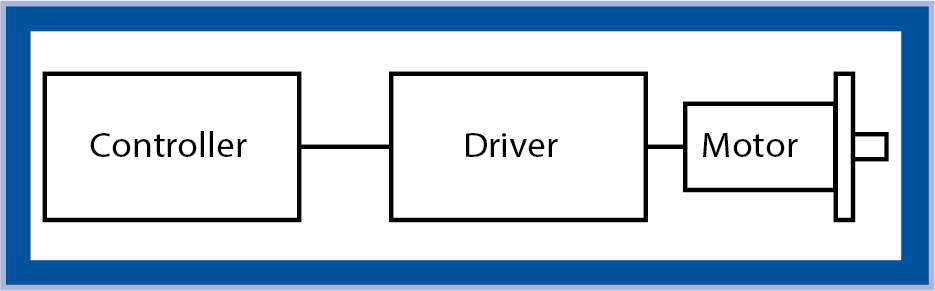
The diagram above shows a typical step motor based system. All of these parts must be present in one form or another. Each component’s performance will have an effect on the others.
First is the pulse generator, also known as a controller or indexer. The pulse generator will output command pulses that the motor will follow. By altering the frequency of the pulse train, the pulse generator can instruct the motor to accelerate, run at a speed, decelerate or stop. A pulse generator must be present otherwise the motor will not move.
Next is the motor driver. The driver’s function is to control the magnitude and direction of current flow into the motor windings. The driver takes the pulses from the pulse generator and determines how and when the windings should be energized. The windings must be energized in a specific sequence to generate motion.
Finally there is the step motor itself.
A step motor has two primary parts; the rotor, the moving piece, and the stator, the stationary piece. The stator contains coils of wire called windings. The rotor spins on bearings or bushings inside the stator. All step motors operate through the principle of the rotor following a rotating magnetic field created by sequencing the flow of current through the stator windings. Each NMB step motor has two phases, which are groups of electrically connected windings. As current is passed through each phase, the motor takes “steps” or small movements to keep in synchronism with the magnetic field. The degree of rotation per step depends on the style of driver used and the construction of the motor.
Stepping Motor Advantages
Step motors have several advantages over other types of motors. One of the most impressive is their ability to position very accurately. NMB’s standard step motors have an accuracy of +/-5%. The error does not accumulate from step to step. This means that a standard step motor can take a single step and travel 1.8° +/-0.09°. Then it can take one million steps and travel 1,800,000° +/-0.09°. This characteristic gives a step motor almost perfect repeatability. In motor terms, repeatability is the ability to return to a previously held position. A step motor can achieve the same target position, revolution after revolution.
Step Motor Advantages:
- Accuracy & Repeatability – Ability to position accurately.
- Responsiveness & Quick Acceleration – Step motors have low rotor inertia, allowing them to get up to speed quickly. This makes step motors an excellent choice for short, quick moves.
- Excellent torque for their size – Step motors have the highest torque per cubic inch of any motor.
- Positioning Stability – Unlike other types of motors, step motors can be held completely motionless in their stopped position.
- Open Loop Control – Open loop control is simpler, more reliable and less expensive than feedback-based (closed loop) control. In closed loop systems, encoders are used to count the number of steps taken by the motor. The number of steps taken is compared to the number of step commands given. This feedback is used to make position corrections or initiate alarm signals. Encoders and their associated electronics add additional cost to a motion control system. Assuming that a step motor is properly sized for its load, it should never miss a step, making an encoder unnecessary.
- Cost and Reliability – Step motor technology is reliable and proven. It is the most cost effective method of precision position control.
Construction and Operating Theory
Hybrid Motor
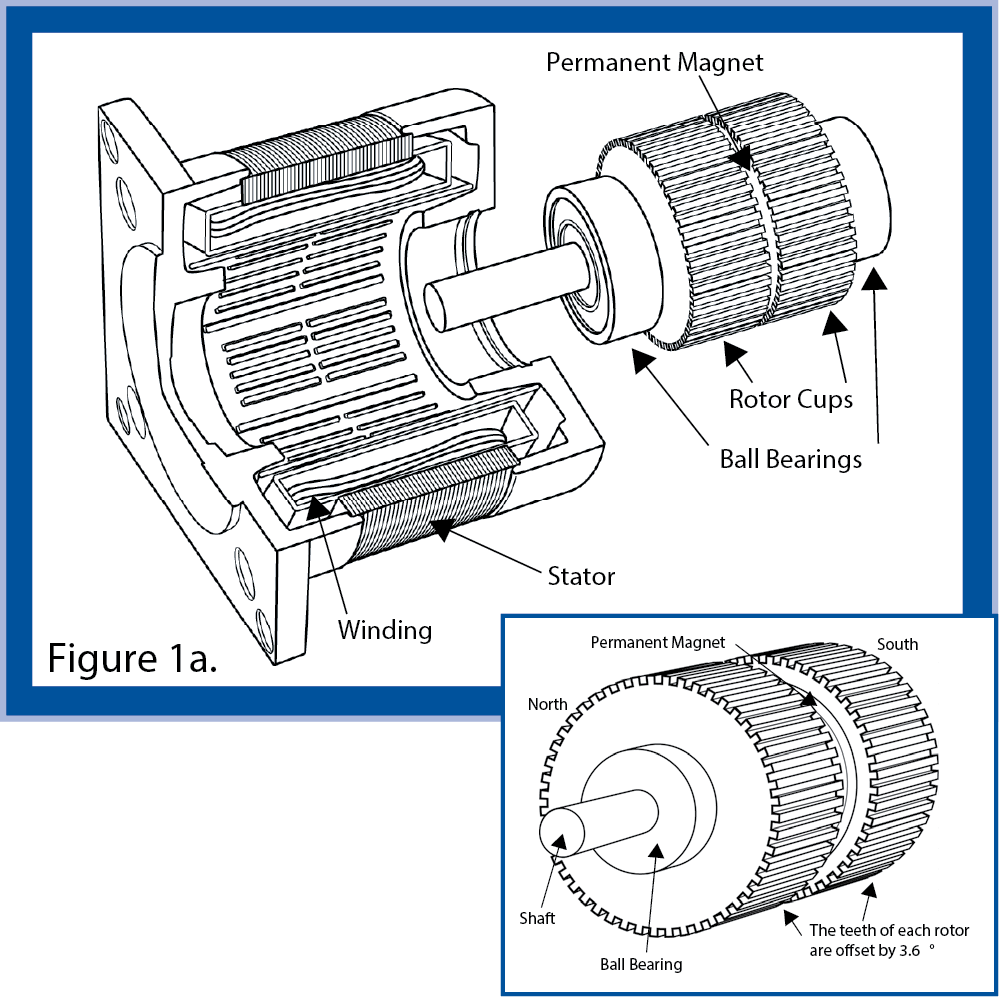
Figure 1a depicts a 1.8° hybrid step motor. The rotor contains a permanent magnet similar to those found in permanent magnet step motors. Hybrid rotors are axially magnetized, one end polarized north and the other polarized south. Both the rotor and the stator assemblies of hybrid motors have tooth-like projections. These “teeth” align in various configurations during rotation.
To understand the rotor’s interaction with the stator, examine the construction of a 1.8° (the most common resolution) hybrid step motor. First, the rotor is composed of two 50-tooth rotor cups enclosing a permanent magnet. The two cups are oriented so that the teeth of the top cup are offset to the teeth of the bottom cup by 3.6°. Second, the stator has a two-phase construction. The winding coils, 90° apart from one another, make up each phase. Each phase is wound so that the poles 180° apart are the same polarity, while the poles 90° apart are the opposite polarity. When the current in a phase is reversed, so is the polarity, meaning that any winding coil can be either a north pole or a south pole.
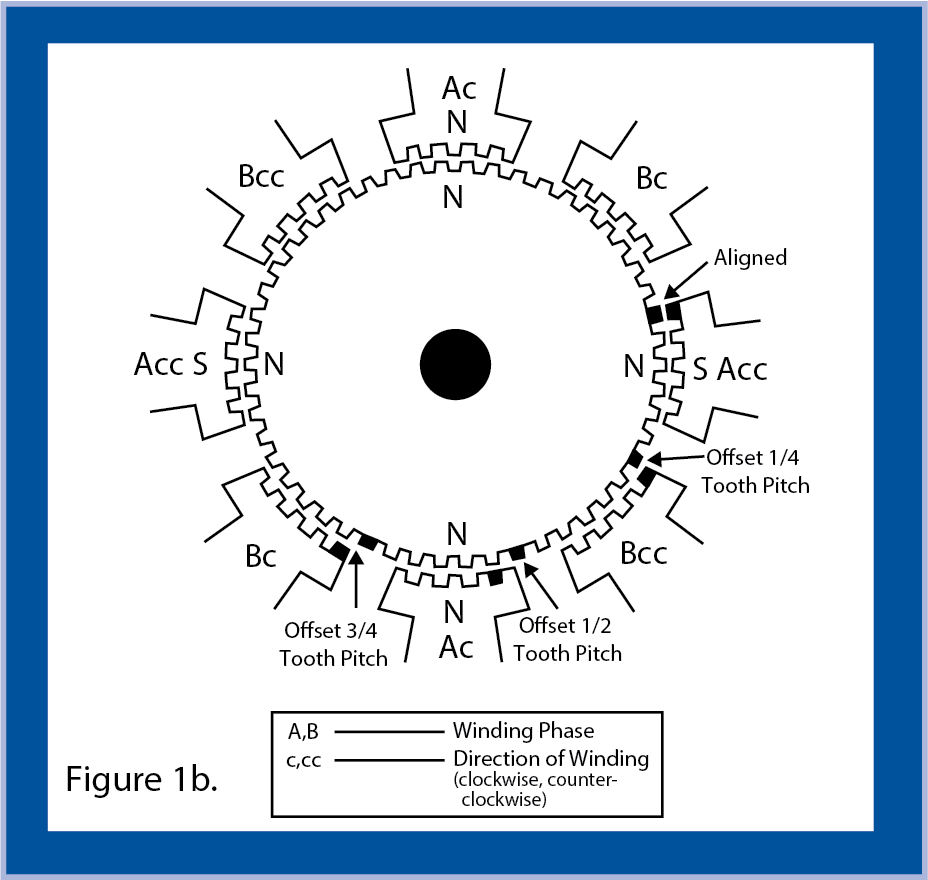
As shown in fig. 1b below, when phase A is energized, the windings at 12 o’clock and 6 o’clock are north poles, and the windings at 3 o’clock and 9 o’clock are south poles. The windings at 12 and 6 would attract the teeth of the magnetically south end of the rotor, and windings at 3 and 9 would attract the teeth of the magnetically north end of the rotor. The desired direction of travel determines the next set of poles to be energized. The driver controls this phase sequencing. Because there are 50 teeth on the rotor, the pitch between teeth is 7.2°. As the motor moves, some rotor teeth are in alignment with the stator teeth. The other rotor teeth are out of alignment with the stator teeth by 3/4, 1/2 or 1/4 of a tooth pitch. When the motor takes a step, it will move to the next closest position where the rotor and stator teeth are aligned. The rotor will move 1/4 of 7.2°. The motor will move 1.8° with each step.
Permanent Magnet Motor
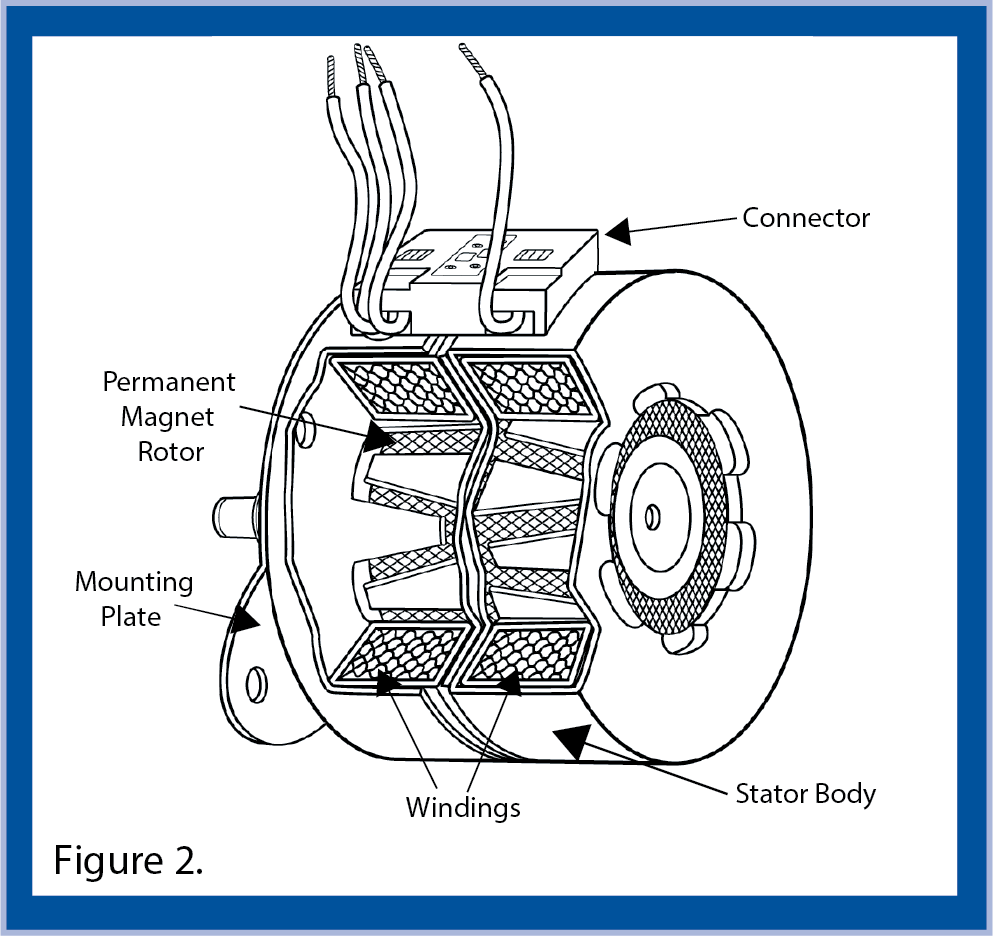
Figure 2 depicts a permanent magnet type motor, or “PM” motor. The rotor contains a permanent magnet, giving PM type motors their name. Permanent magnet step motors work on the same principles as hybrids but use a slightly different geometry. PM rotors are radially magnetized, north and south poles alternating along the circumference of the rotor. A pole pitch is the angle between two poles of the same polarity, north to north or south to south. Both the rotor and the stator assemblies of PM motors are smooth.
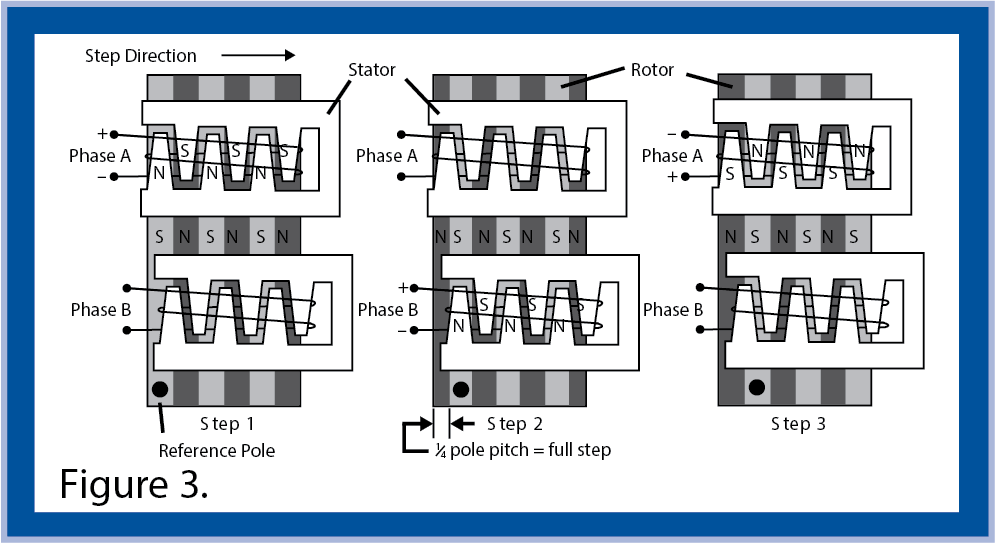
The stator sections of the A phase and the B phase are mechanically offset by one quarter pole pitch. Each phase’s stator section has projections offset by one half of a pole pitch. As current is passed through the windings a rotating magnetic field is established. The rotor of the permanent magnet motor will move in synchronism with this rotating field. See Fig. 3.
Drivers
The basic function of a motor driver is to provide the rated current to the motor windings in the shortest possible time. Driver voltage plays a large part in a step motor’s performance. Higher voltage forces current into the motor windings faster, helping to maintain high speed torque.
Two of the most commonly used drivers for step motors are the following:
Constant current drivers are also known as PWM (pulse width modulated) or chopper drives. In this type of driver, the motor current is regulated by switching voltage to the motor on and off to achieve an average level of current. These drivers operate using a high voltage supply, generating a high driver voltage to motor voltage ratio, giving the motor improved highspeed performance.
Constant voltage drivers are also known as, L/R or resistance limited (RL) drivers. In this type of driver, the amount of current a step motor receives is limited only by the resistance/impedance of its windings. For this reason, it is important to match the motor’s rated voltage to the voltage of the driver. Constant voltage drivers work best in low speed and low current applications. They become inefficient at high speeds and high current levels. In certain situations, resistors may be placed in series with the motor’s windings to allow the motor to be operated using a driver voltage larger than the motor’s rated voltage to increase performance at higher speeds.
Driver & Winding Configurations
Step motor drivers can be divided into two types, unipolar and bipolar. All 6 and 8 lead wire motors manufactured by NMB can be configured to be driven by either a bipolar or a unipolar driver, however, 4 lead wire motors can only be run by bipolar drivers.
Unipolar drivers can send current through a motor’s windings in only one direction. Unipolar drivers tend to achieve better high-speed performance.
Bipolar drivers can send current through a motor’s windings in both directions. Step motors can be connected to these drives in several different ways to get different motor performance, making a bipolar drive much more flexible than a unipolar drive.
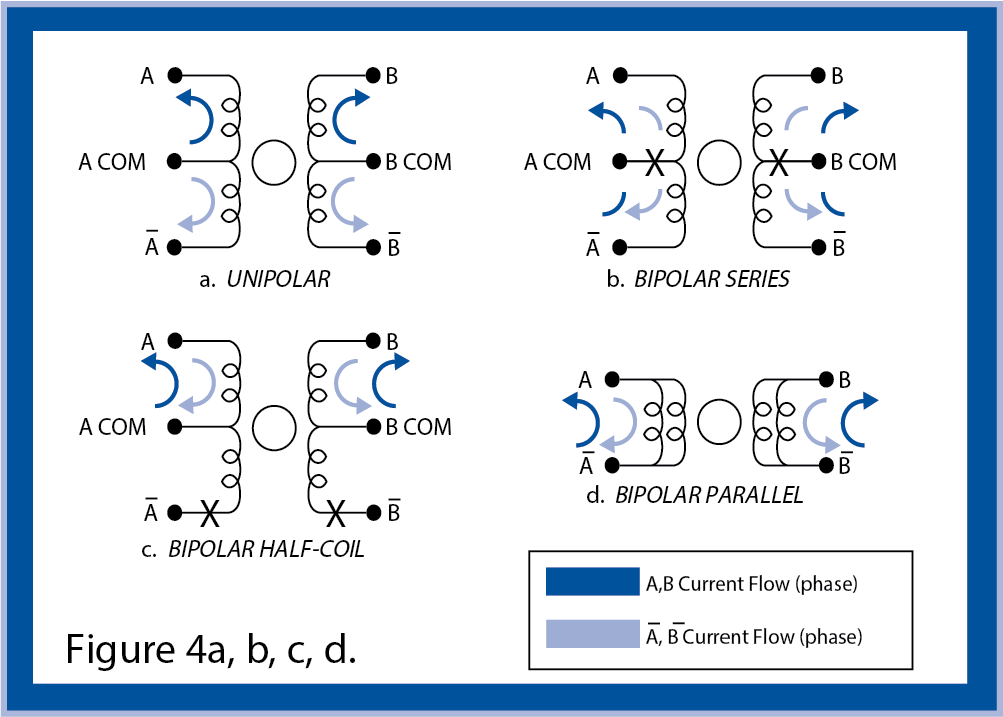
In a unipolar winding configuration, only half the coils of each winding are used at a time. Energizing half of the coils is beneficial because it reduces the winding’s inductance. Inductance is an electrical property that fights changes in current flow, particularly at higher speeds. The unipolar winding configuration tends to give better high-speed performance. The disadvantage of this type of configuration is that at lower speeds it tends to give less torque than configurations that use the entire winding. See Fig. 4a.
In a bipolar series winding configuration, both halves of the phase are connected in series. Since the full coil is used, the same motor will produce 40% more torque in the low to mid speed range. Unfortunately, this configuration has four times the inductance of the same motor operated in the unipolar configuration. Although the motor has good low speed torque, the torque will drop off rapidly at high speeds. See Fig. 4b.
A bipolar half coil winding configuration can be used to achieve unipolar performance with a bipolar drive. In this configuration, the motor’s inductance and low speed torque are less than those in the bipolar series configuration. As in the unipolar configuration, the half coil configuration tends to give better performance at higher speeds. Both 6 and 8 lead wire motors can be connected in the bipolar half coil configuration. See Fig. 4c.
A bipolar parallel winding configuration can only be achieved using an 8 lead wire motor or by internal wiring. In a parallel configuration, one half of the winding phase is placed in parallel with the other half. This allows the full winding to be used while keeping the inductance low. This combination allows the bipolar parallel configuration to produce 40% more torque than the unipolar winding configuration while still performing well across a wide range of speeds. However, due to the parallel configuration, the winding resistance is halved and the motor will require 40% more current than the same motor run in a unipolar configuration to produce this increased torque. See Fig. 4d.
Full, Half and Microstepping
There are three commonly used excitation modes forstep motors; these are full step, half step and microstepping.
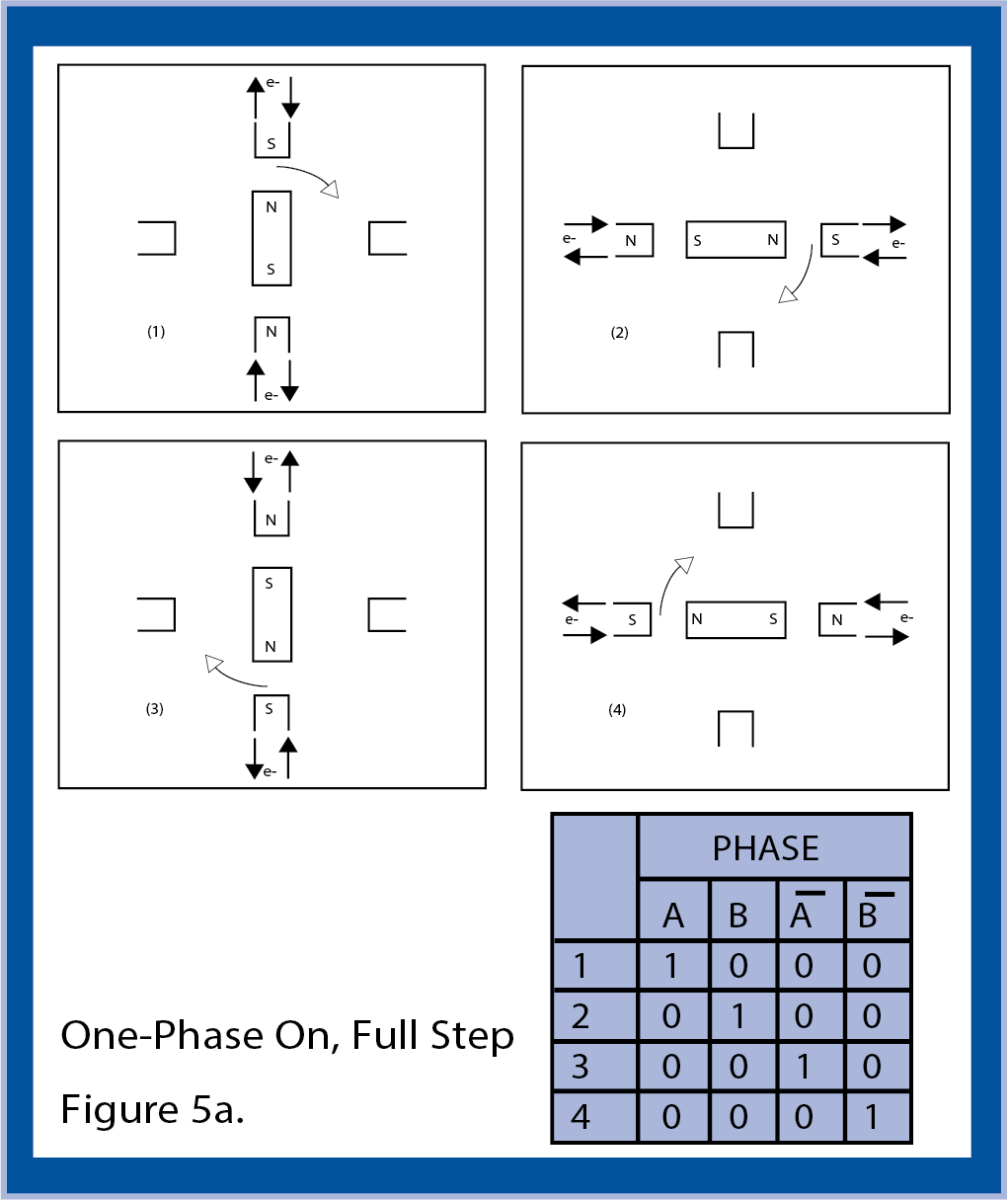
In full step operation, the motor moves through its basic step angle, i.e., a 1.8° step motor takes 200 steps per motor revolution. There are two types of full step excitation modes. In single phase mode, also known as “one-phase on, full step” excitation, the motor is operated with only one phase (group of windings) energized at a time. This mode requires the least amount of power from the driver of any of the excitation modes. See Fig. 5a.
In dual phase mode, also known as “two-phase on, full step” excitation, the motor is operated with both phases energized at the same time. This mode provides improved torque and speed performance. Dual phase excitation provides about 30% to 40% more torque than single phase excitation, but does require twice as much power from the driver. See Fig. 5b.

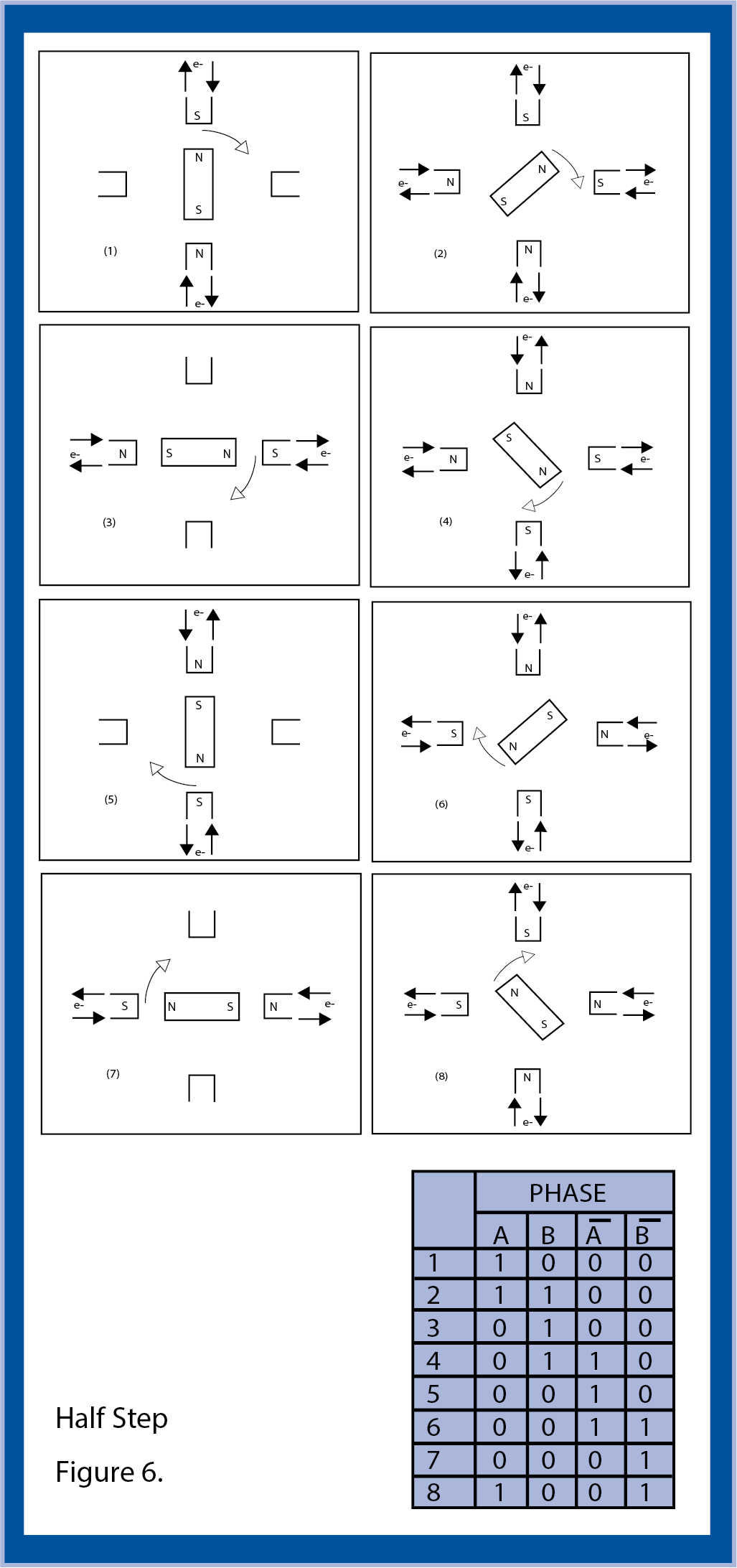
Half step excitation is alternating single and dual phase operation resulting in steps that are half the basic step angle. Due to the smaller step angle, this mode provides twice the resolution and smoother operation. Half stepping produces roughly 15% less torque than dual phase full stepping. Modified half stepping eliminates this torque decrease by increasing the current applied to the motor when a single phase is energized. See Fig. 6.
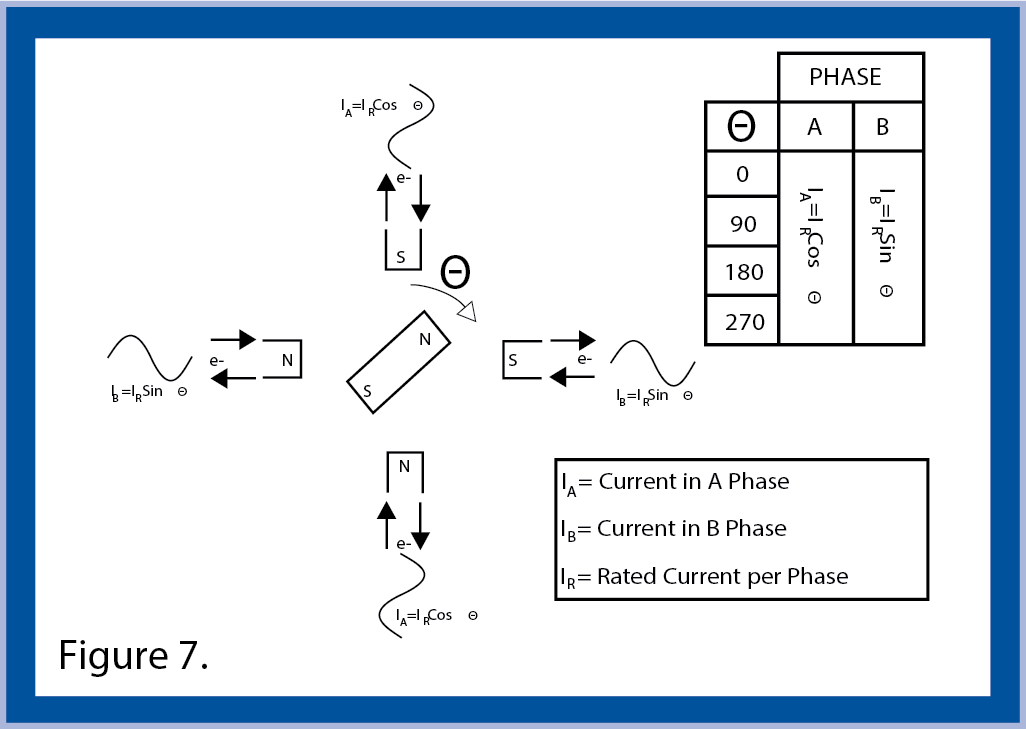
Microstepping is a technique that increases motor resolution by controlling both the direction and amplitude of current flow in each winding. Current is proportioned in the windings according to sine and cosine functions. Microstepping can divide a motor’s basic step up to 256 times. Microstepping improves low speed smoothness and minimizes low speed resonance effects. Microstepping produces roughly 30% less torque than dual phase full stepping. See Fig. 7.
Vibration and Resonance
When a step motor makes a move from one step to the next, the rotor doesn’t immediately stop. The rotor actually passes up its final position (overshoots), then goes past it in the opposite direction (undershoots), then moves back and forth until it finally comes to rest.
We call this “ringing,” and it occurs every time the motor takes a step. In most cases, the motor is commanded to move to the next step before it comes to a rest.
Unloaded, the motor exhibits a fair amount of ringing. This ringing translates into motor vibration. The motor will often stall if it is unloaded or under-loaded, because the vibration is high enough to cause the motor to lose synchronism. Loading the motor properly will dampen these vibrations. The load should require somewhere between 30% to 70% of the torque that the motor can produce, and the ratio of load inertia to rotor inertia should be between 1:1 and 10:1. For shorter, quicker moves, the ratio should be closer to 1:1 to 3:1.
A step motor will exhibit much stronger vibrations when the input pulse frequency matches the natural frequency of the motor. This phenomenon is called resonance. In resonance, the overshooting and undershooting become much greater, and the chance of missing steps is much higher. The resonance range may change slightly due to the damping effect of the load’s inertia.
Troubleshooting Vibration and Resonance
A two-phase step motor can only miss steps in multiples of four full steps (equivalent to one tooth pitch or pole pitch). If the number of missing steps is a multiple of four, vibration or overloading may be causing a loss of synchronism. If the number of missing steps is not a multiple of four, an electronics problem is most likely the issue.
There are a number of ways to get around resonance. The easiest way is to avoid the resonant speed range altogether. The resonant frequency for a two-phase motor is around 200pps; motors can be started at speeds above the resonant range. Accelerating quickly through the range is recommended if the motor must be started at a speed below the resonance range.
Half stepping and microstepping are also effective means of reducing vibration. Both methods reduce the size of each motor step. When the motor step angle is made smaller, the motor will vibrate less. The motor does not have to travel as far for each step, and less energy will be wasted in overshooting and undershooting.
Step motors react differently to different loads. Make sure that the motor is sized properly to the load.
Torque / Speed Curves
It is very important to know how to read a torque/speed curve because it describes what a motor can and cannot do. It is also important to keep in mind that a torque/speed curve is for a given motor and a given driver. Torque is dependent on the driver type and voltage. The same motor can have a very different torque/speed curve when used with a different driver. The torque/speed curves in this catalog are given for reference only. The same motor with a similar drive, similar voltage and similar current should give similar performance. Torque/speed charts can also be used to roughly estimate the torque produced using different drivers at varying voltages and currents.
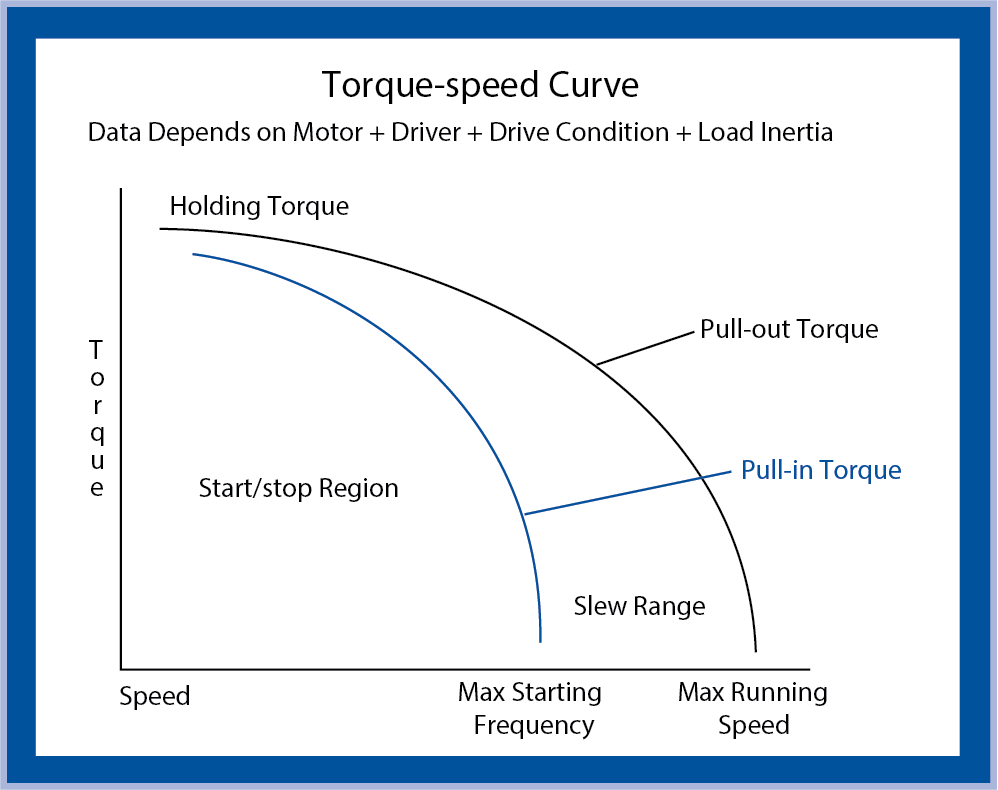
Torque/speed curves have torque on the Y-axis, measured in N-m (in this catalog), and speed on the X-axis, measured in PPS (pulses per seconds) or Hz.
- Holding Torque – amount of torque that the motor produces when it has rated current flowing through the windings but the motor is at rest.
- Detent Torque – amount of torque that the motor produces when it is not energized. No current is flowing through the windings.
- Pull-in Torque Curve – Shows the maximum value of torque at given speeds that the motor can start, stop or reverse in synchronism with the input pulses. The motor cannot start at a speed that is beyond this curve. It also cannot instantly reverse or stop with any accuracy at a point beyond this curve.
- Stop / Start Region – area on and underneath the pull-in curve. For any load value in this region, the motor can start, stop, or reverse “instantly” (no ramping required) at the corresponding speed value.
- Pull-out Torque Curve – Shows the maximum value of torque at given speeds that the motor can generate while running in synchronism. If the motor is run outside of this curve, it will stall.
- Slew Range – the area between the pull-in and the pull-out curves, where to maintain synchronism, the motor speed must be ramped (adjusted gradually).
Performance Factors
Torque is proportional to the winding current and the number of turns of wire. To increase torque by 20%, increase the current by about 20%. To decrease the torque by 50%, reduce the current by 50%. Because of magnetic saturation, there is no advantage to increasing the current to more than 2 times the rated current and doing so may damage the motor.
Inductance reduces a step motor’s high speed torque performance. Inductance is the reason all motors eventually lose torque at higher speeds. Each motor winding has a certain value of inductance and resistance.
The “electrical time constant” is the amount of time it takes a motor coil to charge up to 63% of its rated value. If a motor is rated at 1 amp, after one time constant, the coil will be at 0.63 amps, giving the motor about 63% of rated torque. After two time constants, the current will increase to 0.86 amps, giving the motor about 86% of rated torque.
t = L/R
Inductance “L” (mH), divided by resistance “R” (Ω), gives the electrical time constant “t” (ms).
At low speeds, high inductance is not a problem. Current can easily flow into the motor windings fast enough that the motor has rated torque. At high speeds, however, sufficient current cannot get into the winding fast enough before the current is switched to the next phase, thereby reducing motor torque. Increasing the driver voltage can fight this loss of torque at higher speeds by forcing current into the windings of the motor at an increased rate.
In summary, the current and the number of coil turns in the windings determine a motor’s maximum torque output, while the voltage applied to the motor and the inductance of its windings will affect the speed at which a given amount of torque can be generated.
Glossary
Acceleration – The time rate of change in velocity. Torque developed between the rotor and stator will cause the rotor to accelerate. The inertia of the rotor, and load, if any, will resist the applied torque and thus control the rate of acceleration.
Back EMF – The voltage produced across a winding due to its interaction with the rotating magnetic field generated by the motion of the rotor. Back EMF is proportional to the velocity of the rotor and in opposition to the voltage applied to the winding by the motor drive.
Bifilar Winding – A set of electrically connected coils in which two wires are simultaneously wound together around the stator.
Bipolar Driver – A driver capable of generating current flow through a winding in both directions.
Center Tap / Common Wire – The lead wire that connects the two wires in a bifilar winding. When a motor is operated in the unipolar winding configuration current enters each winding through the center tap, generally designated as A com or B com.
Closed Loop Control – A system of control in which the output or some result of the output is measured. This information is compared to the input to verify command execution and make adjustments, if necessary.
Constant Current Driver / Chopper Driver / PWM Driver – A driver capable of adjusting the applied voltage across a winding to force and maintain rated current. A voltage is applied until the winding current reaches a pre-determined value. The supply is then switched off and it remains off until the current decays to a second lower pre-determined value. At that time the voltage is re-applied.
Constant Voltage Driver / L/R Driver / Resistance Limited (RL) Driver – A driver which maintains a constant applied voltage across each energized winding. The flow of current is limited only by the resistance/impedance of each winding.
Controller / Indexer / Pulse Generator – A device or circuit that generates a DC pulse train which is sent to the step motor drive. The number and rate of pulses generated determine the number and rate of steps the motor will ultimately execute.
Damping – The suppression of oscillations at the end of motion or during motion.
Detent Torque – The torque required to rotate a non-energized step motor.
Driver / Drive – An electrical device that drives a step motor based on pulses from a controller / indexer / pulse generator. A driver translates the pulse train and energizes the appropriate step motor windings.
Efficiency – The ratio of power output to power input.
Electronic Damping – The suppression of vibration by altering the flow of current to or the step rate of a motor.
Electrical Time Constant – The time required for a motor’s windings to charge to 63% of their rated current value.
Electromotive Force / EMF – A synonym for voltage, generally used to describe generated voltage.
Encoder – A feedback device which can be used to derive positional and velocity information.
End Taps – The lead wires that terminate (end) a phase/winding.
Energize / Excite – To send current through a phase or phases of a step motor
End Play – The axial shaft displacement due to an axial force.
Feedback – The output or result of the output that is measured and sent back to the controller for comparison with the input during closed loop control.
Full Step Angle – The size of an incremental move made by a step motor determined solely by the motor’s construction.
Full Stepping – A method of driving a step motor in which each incremental movement is equal to the motor’s full step angle.
Half Stepping – A method of driving a step motor in which its full step angle is electrically halved by alternating between energizing one or two of the motor’s phases.
Half Stepping (Modified) – A method of half stepping in which the amount of current delivered to each phase is varied, depending on the number of phases energized, to generate uniform torque throughout the entire step sequence.
Holding Torque / Static Torque – The maximum external torque that can be applied to an energized step motor at 0 pps without causing rotation.
Hybrid Step Motor – A step motor constructed using a permanent magnet rotor and whose rotor and stator assemblies are both made with tooth-like projections.
Inductance – The property of a winding that resists changes in current flow. Inductance is proportional to the square of the number of coil turns in each winding. The effects of inductance are especially noticeable at higher speeds.
Inertia – A physical property of matter that resists changes in speed or direction. Inertia of load affects the amount of torque required to accelerate and decelerate.
Inertia (Reflected) – The apparent inertia value transmitted to a step motor through a gear train. The apparent value is the actual inertial value divided by the square of the gear ratio.
Mechanical Damper – A vibration reducing device which is physically attached to a step motor.
Microstepping – A method of driving a step motor in which the full step angle of a motor is reduced electrically by separately controlling the amount of current to each motor phase.
Non-Cumulative Error – Error that does not add or accumulate over multiple steps or incremental movements.
Open Loop Control – A system of control in which the motor operates without feedback.
Overshoot – Rotation of a motor beyond its commanded position.
Permanent Magnet Step Motor – a.k.a. “PM” or “Tin Can,” a step motor constructed using a permanent magnet rotor and whose rotor and stator assemblies are both smooth.
Phase / Winding – A group of electrically connected coils.
Poles – Areas of a motor where a magnetic pole is generated either by a permanent magnet or by passing current through the coils of a winding.
Pole Pitch – The angle between adjacent poles of the same polarity on the rotor of a PM motor. The pole pitch determines the full step angle of a PM motor.
Pull-in Torque Curve – A graph showing the maximum torque, for a given speed, where a load can be accelerated into synchronism from a standstill.
Pull-out Torque Curve – A graph showing the maximum torque that can be applied to a step motor operating at a given speed without losing synchronism.
Pulse – An electrical signal or voltage of short duration.
Pulse Rate – Rate that successive pulses are sent or steps are initiated.
Radial Play – Displacement perpendicular to the shaft due to a force applied perpendicularly to the shaft axis.
Ramping – Increasing (or decreasing) the step rate of a motor gradually to prevent loss of synchronism.
Rated Current – The maximum allowable continuous current the motor can handle without exceeding its temperature rating at ambient temperature (usually 25ºC). It is the current at which rated holding torque has been determined.
Rated Voltage (Volts) – The voltage at which rated torque is generated with the motor at ambient temperature. Its value is the product of rated current and winding resistance.
Repeatability – The ability to return to a previously held position.
Resolution – The amount of rotation or linear motion produced when a motor executes a single step.
Resonance – A phenomena where excessive vibration occurs due to the motor operating at a frequency at or near the natural frequency of the entire system.
Resonant Range – The range where a motor’s step rate is near the natural frequency of the motor. A motor operating in this range may experience excessive vibration.
Rotor – The rotating part of the motor (including magnets).
Slew Range – The region between the pull-in and pull-out torque curves. A motor may operate in this range, but cannot start, stop or reverse without ramping.
Stator – The stationary part of the motor, (including windings).
Step – The movement of the rotor from one energized position to the next.
Step Accuracy – A measure of a step motor’s maximum deviation from its desired or indicated position, calculated as a percentage of the step angle. This deviation is non-cumulative, meaning that the deviation found in any number of steps is no greater than the maximum deviation found in a single step.
Step Angle – The nominal angle through which the shaft of a step motor turns between adjacent step positions. It is dependent upon the motor and driver sequence (full, half or microstepping).
Step (Stepping, Stepper) Motor – An actuator that translates discrete input pulses into motion composed of discrete incremental movements.
Step Rate – The rate in steps per second at which a step motor is commanded to operate.
Step Sequence – The pattern in which a step motor’s phases are energized to generate motion.
Switching – Turning on and off voltage/current to a motors winding.
Synchronism – The condition in which a rotor’s rotation matches the rotation of the magnetic field created by the stator’s windings. In synchronism the motor’s step rate equals the controller’s input pulse rate. When synchronism is lost, the motor will stall or misstep.
Teeth – Projections on the rotor and stator found in hybrid step motors.
Tooth Pitch – The angle between adjacent teeth on the rotor. The tooth pitch determines the full step angle of a hybrid motor.
Torque – A force that produces rotational motion.
UnipoIar Driver – A driver capable of generating current flow through a winding in only one direction.
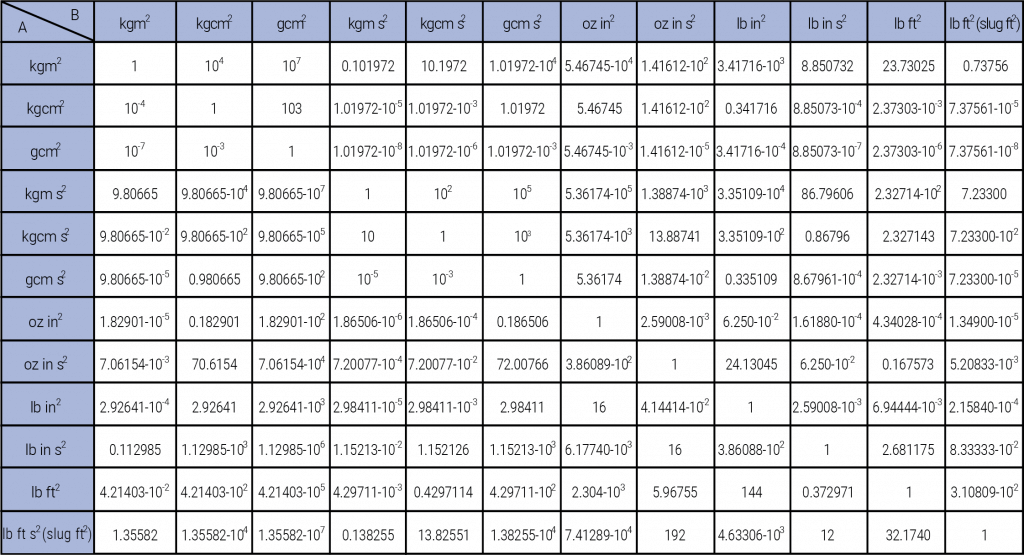
Conversion Factors
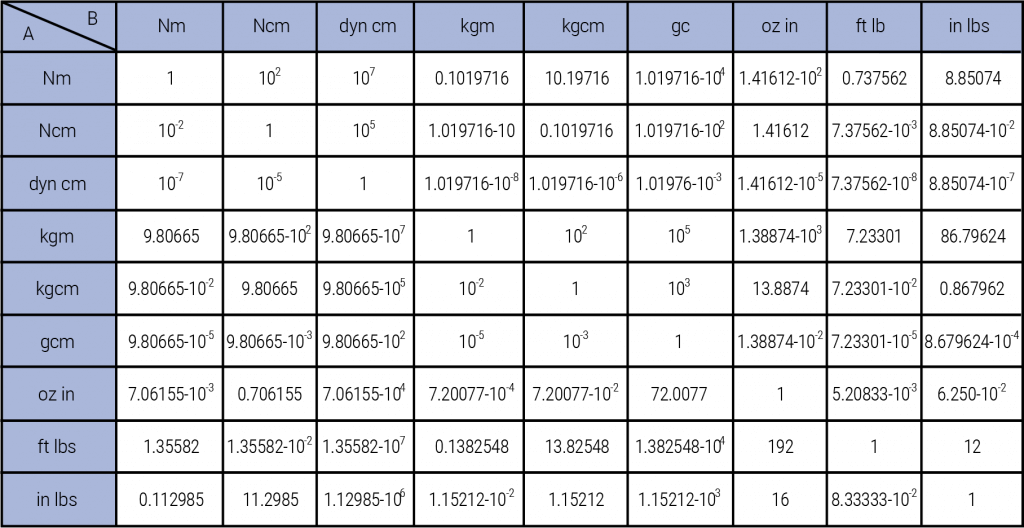
Torque Conversion Factors
Moment of Inertia Conversion Factors